Kai Turner
Open for casual work or internships!
PROJECT SUMMARY
VERSION DESCRIPTION
TARS V1 is a quadrotor drone capable of attaching to live power lines, of multiple diameters, configurations and structure, to inspect and perform minor maintenance. Using dynamically adjusting arms, TARS V1 latches onto the wire with a motor driven pulley system to roll across the wires like a gondola, overcoming small obstacles along the way thanks to its passive suspension system. TARS V2 uses the same quadrotor configuration to fly up to the powerline but instead it lands on top of the powerline where the propeller arms collapse to sit low-centred on the line while using dynamically adjusting powered wheels underneath to roll across the powerline. Controlled through GSM communication, both TARS versions can operate independently, using its camera and robotic arm system to thoroughly inspect transmission cables for corrosion and performing minor repairs such as installing dampeners and bird deflectors. The video feed from the two independent cameras can be live streamed to a device, or TARS can utilise its camera’s machine vision capability to automatically detect and identify corrosion or damage. Once line damage is detected TARS automatically triggers an alert to the operator, whether in proximity to TARS or operating remotely with GSM communication, including the geo-location of the damage and the time received. TARS also can take other forms of measurements such as infrared readings to help diagnose electrical faults or vegetation encroachment measurement via LIDAR readings.
Both versions were built completely from scratch, all aluminium channels, carbon fibre parts and every other structural and mechanical component were designed, machined and constructed by me.
AIM
This project, was designed to provide a solution for decreasing inspection and maintenance costs of power lines while eliminating the hazards involved with these procedures. The electrical industry has many global fatalities and injuries, with Linesman being Australia’s 9th most dangerous occupation. Of all industrial electrical hospitalisations in Australia from 2014-2016, 23.4%[1] of cases were from exposure to electric transmission lines. Traditional methods of inspecting and repairing High-Voltage transmission lines are especially dangerous, with the most hazardous being the aerial mounting of transmission lines, involving risks of electrocution, falls, and crashes. These methods are also very limited, unable to be performed in anything but fine weather conditions, requiring direct human operation in often remote locations and requiring expensive equipment such as a helicopter.
After research analysis, the operation, installation and maintenance costs can be broken up into many different sections. However, this project aims to address the inspection, and maintenance cost as well as the reconditioning cost, which is massively impacted by inspection. Human inspections, additionally, are very expensive due to the extensive safety protocols, long-distance travel, transport to not easily accessible sites, high human wages (due to the extreme danger), expensive equipment and machinery as well as some other factors; In a case study, a relatively very short transmission line (1437m) in a fairly accessible region of Fujian province, China, currently costs >222000 RMB($32000USD) just to conduct inspections of wire conditions over the course of 5 years. These costs scale up exponentially when dealing with increasingly remote and longer transmission lines. This can be seen through a 2004-2009 report by the “Australian Energy Regulator” where inspection and maintenance of transmission lines accounted for the largest section of operation and maintenance costs of all transmission systems. (See figure 2: Distribution of costs spent for O&M by AER during 2000-2001).
Additionally, a considerable portion of maintenance/replacement costs can be attributed to the premature replacement of undamaged or un-corroded transmission lines due to the expected life expectancy of the cable. This further adds to the maintenance costs of operating transmission lines. The scaling of this cost is highlighted even more through the number and length of transmission cables required as a result of the great distances between towns, cities, and power generation infrastructure.
TECHNOLOGY BEHIND TARS
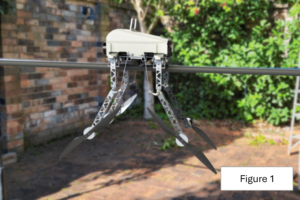
The basic operating principle of TARS V2 is that it first flies up above the powerline in need of inspection, it then lowers down directly onto the cable at which point the arms fold down due to gravity. The arms folding down then lowers the centre of gravity of TARS enough that it can low-centre on top of the wire, balancing passively (as seen in figure 1). If any gusts of wind are encountered, the main flight propellers of TARS which are now oriented sideways can produce a torque to counteract the effects of any crosswind.
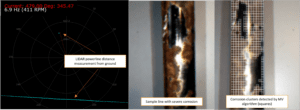
TARS will then roll along the wire using its powered adjustable rollers underneath, instead of flying, saving energy and increasing time of operation. While rolling along the wire TARS uses a machine vision camera to scan for signs of corrosion or scan for any potential thermal issues using infrared imaging and recording down possible hit locations with GPS data and onboard imaging. Additionally the onboard LIDAR can scan for any vegetation encroachment. Once TARS is complete in inspecting a wire or encounters an obstacle on the wire, such as a tower, TARS can reactivate all propellers, passively raising the arms back up ready to take off and land on another segment of the wire (as seen in the video below).
- CAD
- Designed entirely in SOLIDWORKS
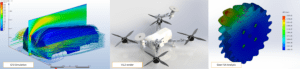
- Utilised CFD simulation to optimize exterior 3D-printed shell and to test aerodynamics of TARS in flight
- Utilised FEA analysis to determine and recognize any weak points or points of optimisation int TARS’ frame
- Exported parts for CAM such as exporting DXF files for a 3 axis CNC router, STL files for a 3D printer (FDM and Resin)
- Created manufacutring drawings for myself to follow during machining processes such as lathing or milling
- Created renderings of designs for display and portfolio purpose
- Software
- Programmed entirely in C++ as that is my main language
- Mostly used micro-controllers, such as the Arduino, in conjuction with AI Booster boards/systems
- Utilised complex control systems such as PID control to manage the flight systems, gyro and accelerometer
- Complex software written to interface geo-locations with flight moves required i.e. autonomous navigation
- Utilised many different sensors and actuators all working together on multiple micro-controllers including the use of LIDAR and rudimentary SLAM.
- Programmed complex camera system capable of machine vision image detection and video live streaming through web servers
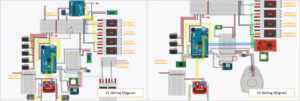
- Electrical
- Featured high current and voltage motors and control systems, all powered by one battery.
- Vastly complex custom power distribution system utilising multiple bus bars and distribution panels
- Beginnings of PCB design, only not completed due to time restraints.
- Electrical engineering of schematics and control circuitry used to enable TARS
- Machining
- Heavily utilised additive manufacturing such as 3D printing with FDM and resin printers with a variety of filaments such as nylon carbon fiber
- Heavily utilised CNC subtractive manufacturing such as CNC routing and laser-cutting of aluminium, polycarbonate, waterjet cutting of carbon fiber
- Heavily utilised machine shop tools such as the mill, drill press, lathe and bandsaws.
- All assembled using fasteners without welding and mostly without adhesives.
- Materials machined: Aluminium, polycarbonate, PLA, Photosensitive resin, steel, Stainless steel

AWARDS WON
Through the TARS project I have won the the highest level robotics achievement possible in the world for an individual at the high school level, First place in robotics and intelligent machines at the International Science and Engineering Fair 2023. At ISEF I was also awarded one of three “best overall project” awards out of the 1600+ projects at the fair from the international society of automotive engineers . I also won 1st place for senior invention/engineering project at ASTA I3, the top science and engineering competition for high schoolers in Australia. Additionally, with TARS I also won the STANSW Young scientist of the year award and other smaller awards and the STANSW Young Scientist competition, the largest high school science and engineering competition in NSW.
Featured by ABC radio: https://www.abc.net.au/listen/programs/scienceshow/winning-student-might-ve-solved-a-pesky-problem/102761794